
In February 2023, researchers from around the country gathered at a NASA-sponsored workshop to discuss the latest developments and a roadmap for a cryobot mission concept to drill through the icy crusts of Europa and Enceladus and search for life.
“Follow the water” has been the mantra of the astrobiology community in search of alien life in the universe. Water is a fundamental building block of all terrestrial life as we know it and—as discovered by various space missions—water is abundant throughout the solar system, and perhaps, the universe.
Ancient eroded features on Mars show clear evidence of a wet history, and the ongoing quest of the Perseverance rover aims to uncover clues as to whether or not Mars once hosted a population of microbes. However, there is only so much we can learn from the fossil record. To truly understand the nature of possible alien life, we must directly investigate the source—the liquid water.
Enter “Ocean Worlds.” Over the past two decades, scientists have discovered that a vast number of icy moons orbit the outer giant planets in our solar system. Many of these moons show strong evidence for harboring global oceans beneath their icy crusts. In fact, these moons likely have far more liquid water than all of Earth’s oceans combined, and some may even have the right conditions to foster life.
Two moons, in particular, have captured the imaginations of astrobiologists due to their amenable conditions for life and their relative ease of interrogation: Jupiter’s moon, Europa and Saturn’s moon, Enceladus. Both show strong evidence of a global subsurface ocean beneath a kilometers-thick water-ice crust—but how can we access this liquid water?

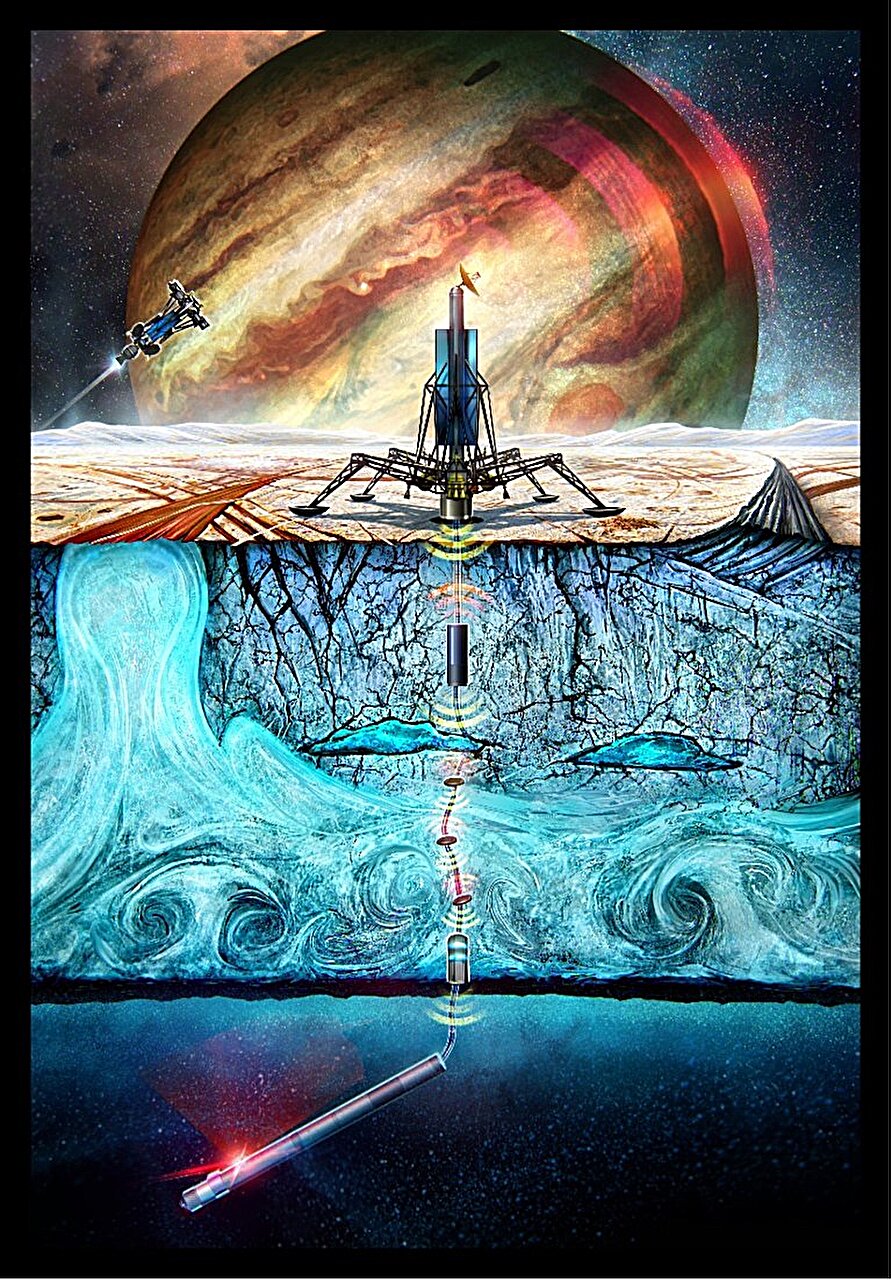
Various concepts for ocean access have been investigated over the past decades, ranging from robots that descend through crevasses to drills of varying types. One concept that has emerged as a leading candidate is the cryobot. A cryobot is a self-contained cylindrical probe that uses heat to melt the ice beneath it. The melted water then flows around the probe before refreezing behind it.
Thermal ice drilling is so simple and effective that it has become a common tool for studying terrestrial glaciers and ice sheets. But how can we translate this technology to a system that can penetrate planetary icy crusts, which are colder, thicker, and more uncertain?
This dilemma has been a core focus of researchers—many of whom are supported by NASA’s Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) and Concepts for Ocean worlds Life Detection Technology (COLDTech) programs—for the past several years. In February 2023, NASA’s Planetary Exploration Science Technology Office (PESTO) convened a workshop at the California Institute of Technology, which brought together nearly 40 top researchers from diverse fields and institutions around the country to discuss progress in maturing this technology and to assess the challenges that remain.
Recent studies have made significant progress in refining our understanding of the ice shell environment, detailing a mission architecture, and maturing critical subsystems and technologies. In particular, workshop participants identified four key subsystems that drive the roadmap for developing a flight-ready architecture: the power, thermal, mobility, and communication subsystems.
First, the heart of a cryobot is a nuclear power system that generates the sustained heat required to melt through kilometers of ice. Various nuclear power systems that could suit a cryobot system have been identified, including the familiar Radioisotope Power Systems (RPS) that have powered many deep-space missions, and fission reactors that may be developed in the coming years.
Two key constraints that drive the power system design are: (1) sufficient total power and density to facilitate efficient melting (about 10 kW), and (2) integration within a structural vessel to protect the power system from the high pressures of the deep ocean.
These challenges are both solvable and have some historical precedent: NASA’s Cassini mission had a 14 kW thermal power system, and several Radioisotope Thermoelectric Generators (RTGs) were deployed to the bottom of the ocean in the 1960s and 1970s as power sources for navigation beacons, which operated in comparable pressures to the Europan ocean.
However, a cryobot power system will require a concerted effort and close collaboration with the Department of Energy throughout the maturation of the mission concept.
Second, a thermal management system is required to manage the heat produced by the onboard nuclear power system, maintain safe internal temperatures, and distribute heat to the environment for efficient performance. This system requires two independent pumped fluid circuits: one that circulates an internal working fluid through channels embedded in the skin and another that circulates melted ice water with the surrounding environment.
Some of these technologies have been demonstrated at reduced and full scale, but more work is needed to validate performance at the range of ice conditions expected in the outer solar system.
In addition, the icy shells of Europa and Enceladus will contain impurities such as dust and salt, which, when sufficiently concentrated, may require auxilliary systems to penetrate. A combination of “water jetting” and mechanical cutting has been demonstrated to be effective at clearing debris ranging from fine particulate to solid blocks of salt from beneath the probe.
Some impurities such as larger rocks, voids, or water bodies may remain impenetrable, requiring the cryobot to incorporate a downward-looking mapping sensor and steering mechanism—both of which have been demonstrated in terrestrial prototypes, though not yet in an integrated system.
High-priority future work includes a more rigorous and probabilistic definition of the icy environments to quantify the likelihood of potential mobility hazards, and an integrated demonstration of hazard mitigation systems on a flight-like cryobot system. Europa Clipper will also provide key observations to constrain the prevalence and characteristics of hazards for a cryobot.
Finally, a cryobot mission requires a robust and redundant communication link through the ice shell to enable the lander to relay data to an orbiting relay asset or directly to Earth. Fiber optic cables are the industry standard for communicating with terrestrial melt probes and deep-sea vehicles, but require careful validation for deployment through ice shells, which are active. The movement of ice in these shells could break the cable.
A team led by Dr. Kate Craft at the Johns Hopkins Applied Physics Laboratory has been investigating the propensity of tethers embedded in ice to break during ice-shear events, as well as methods to mitigate such breakage. While preliminary results from this study are highly encouraging, other teams are exploring wireless techniques for communicating through the ice, including radio frequency, acoustic, and magnetic transceivers. These communication systems must be integrated onto the aft end of the probe and deployed during its descent.
Current projects funded under the NASA COLDTech program are taking the first steps toward addressing key risks for the communications system. Future work must validate performance across a broader range of conditions and demonstrate integration on a cryobot.
While the power, thermal, mobility, and communication subsystems took center stage, workshop participants also discussed other key systems and technologies that will require maturation to enable a cryobot mission.
These topics include an integrated instrument suite with accommodations for liquid sampling and outward-facing apertures, planetary protection and sterilization strategies, materials selection for corrosion mitigation, ice-anchoring mechanisms, and autonomy. However, none of these technologies were identified as major risks or challenges in the cryobot mission concept roadmap.
Overall, the consensus finding of workshop participants was that this mission concept remains feasible, scientifically compelling, and the most plausible near-term way to directly search for life in situ on an ocean world.
Continued support would allow scientists and engineers to make even further progress toward readying cryobots for future mission opportunities. The potential for the direct detection of life on another world seems more possible than ever.
Citation:
Digging deeper to find life on ocean worlds (2023, December 6)
retrieved 6 December 2023
from https://phys.org/news/2023-12-deeper-life-ocean-worlds.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.